

Snap-to-fit, a Haptic 6 DOF Alignment Tool for Virtual Assembly
Virtual assembly of complex objects has application in domains ranging from surgery planning to archaeology. In these domains the objective is to plan the restoration of skeletal anatomy or archaeological artifacts and to achieve an optimal reconstruction without causing further damage. Haptics can improve an assembly task by giving feedback when objects collide, but precise fitting of fractured objects guided by delicate haptic cues similar to those present in the physical world requires haptic display transparency beyond the performance of today's systems. We developed a haptic alignment tool that combines a 6 Degrees-of-Freedom (DOF) attraction force with traditional 6 DOF contact forces to pull a virtual object towards a local stable fit with a fixed object (Figure 1). Hierarchical data structures and pre-computation combine to achieve haptic rates for fractured surfaces with over 5000 points. We have demonstrated the use of our system on applications from both cranio-maxillofacial surgery and archaeology (Figure 2).
|
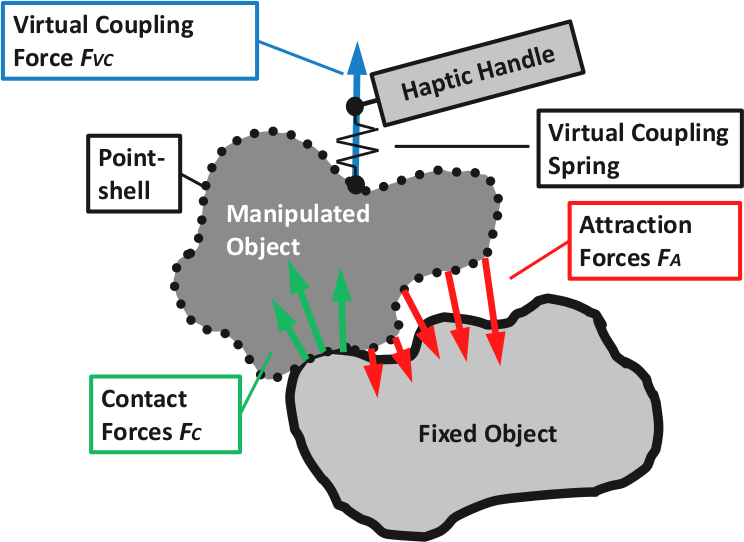
| Figure 1: Snap-to-fit: Forces act on two virtual objects during reassembly. Contact forces push the objects apart at the contact site to prevent penetration. Attraction forces pull the manipulated object towards the fixed object to automatically find the closest stable fit. The user can apply external forces via the virtual coupling to interactively search for the best fit. |
| Figure 2: Video: Two examples of the use of Snap-to-fit. In the first example, we use Snap-to-fit as a guide to find the proper position of a fractured and displaced zygomatic bone, loaded from volumetric CT data. In the second example, we assemble a pre-historic spear tip, fractured into two pieces. |
People
- Ingrid Carlbom, Centre for Image Analysis
- Pontus Olsson, Centre for Image Analysis
- Fredrik Nysjö, Centre for Image Analysis
- Jan-Michael Hirsch, Department of Surgical Sciences, Oral and Maxillofacial Surgery
Related Projects
Haptics-Assisted Cranio-Maxillofacial Surgery Planning
Visualization and Haptics for Interactive Medical Image Analysis
Orbit Segmentation