 |
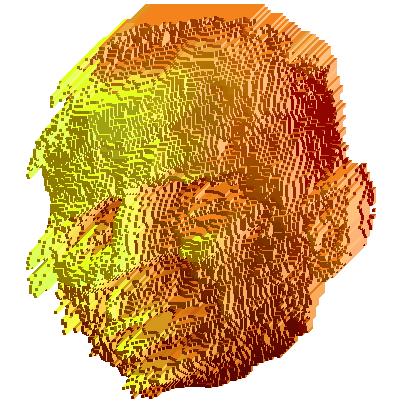 |
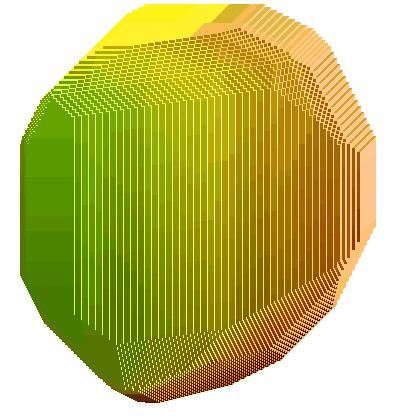 |
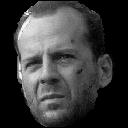
| (a) Bruce | (b) 3D Bruce | (c) 3D convex hull |
 |
 |

|
| (d) Grey-level convex hull | (e) Grey-level concavities | (f) 3D concavities |
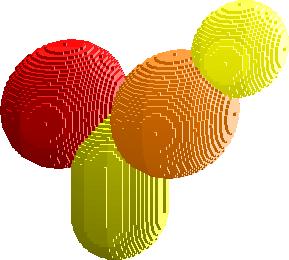
Figure 14: Decomposed synthetic object, with parts shown using different grey-levels, resembling an object from an application where decomposition is a suitable shape representation scheme.
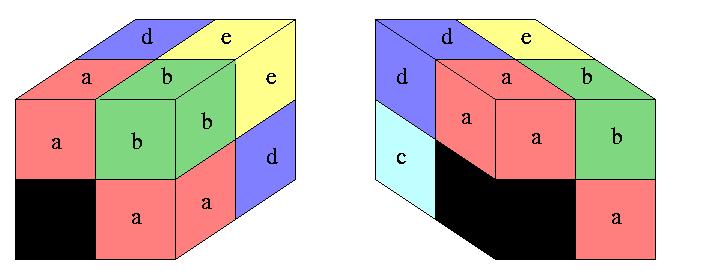
Figure 15: Local distances for 3×3×3 WDTs in rectangular grids. (Two views of the same neighbourhood.)
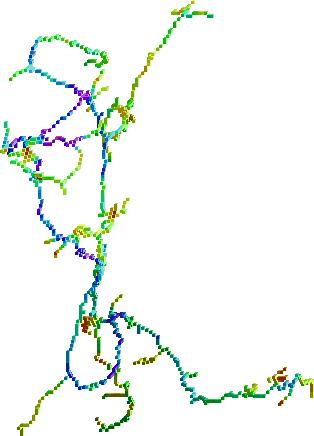
Figure 16: Blood vessel and its grey-medial surface representation. [By courtesy of Dr. Punam K. Saha, MIPG, Dept. of Radiology, University of Pennsylvania, Philadelphia.]
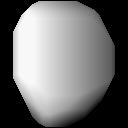
Figure 17: The shadowed area is not set to ambient light, as usually is the case, which would make it flat and dull. Instead, a new modified Phong-Blinn model is used where the underlying geometry is clearly visible.