

Feeling is believing
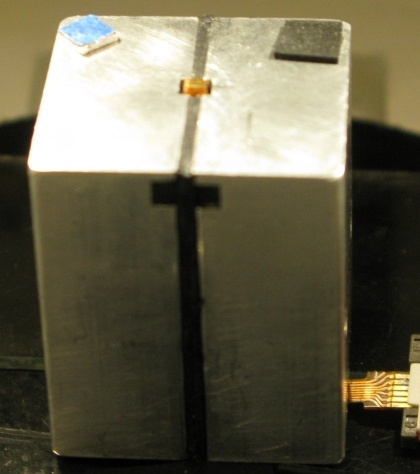
Our long-term goal is to provide tactile feedback in the fingertips of a haptic glove. Initially we explored the possibility and limits of a solution based on an array of ultrasonic motors which were all, at the same time, driven laterally by a motorized table to create lateral forces. Our study shows that lateral forces should be generated independently by each array element resulting in the development of a completely new approach for 3-axis force and movement generation from each array element. We built and tested a first prototype comprising a single array of 1.4 x 1.4 mm element, intended for an array with 2 mm pitch (Figure 1). Our tests show that this type of solution can be used in array formats and that each element can generate lateral forces. The lateral speed is about 5 mm/sec which is close to the requirement. It is also possible to move objects with very small mass which is required for skin stimuli. The design is based on piezoelectric bimorphs that can be surface mounted on flexible printed circuit boards, i.e., the design is already prepared for industrial production. The ultimate solution will require further development to fulfill all requirements.
|
| Figure 1: A 1x1 touch pad array based on vibrating bimorphs in a frame. |
People
- Ingrid Carlbom, Centre for Image Analysis (Project Leader)
- Ewert Bengtsson, Centre for Image Analysis
- Martin Ericsson, Centre for Image Analysis
- Robin Strand, Centre for Image Analysis
- Stefan Johansson, Division of Micro Systems Technology (also PiezoMotor AB).
- Roland S Johansson, Umeå University (Consultant)
Industrial Collaborators
PiezoMotor AB, Uppsala
Period
Project started and ended in 2009.
Related projects
Whole hand haptics
Visualization and haptics for interactive medical image analysis
Financing
The Visualization Program by Knowledge Foundation.