

Custom Mandibular Implant Design with Deformable Models and Haptics
We propose a semi-automatic method based on deformable models and haptics that allows a surgeon to easily design, adjust, and virtually test the fit of a scaffold implant before production. This is a new component if our interactive system for cranio-maxillofacial (CMF) surgery planning that relies on stereo visualization and haptics to allow a surgeon, with minimal system training, to plan complex surgical procedures.
The surgeon begins by selecting a case and the system loads patient specific data with the anatomic regions of interest, in this case the mandible, from pre-segmented CT-data. The mandible appears on the stereo display as a virtual object that the surgeon can manipulate freely in 3D using a Geomagic Phantom Omni haptic device (3D pen with force feedback). A flexible interactive cutting tool, not limited to planar cuts, allows virtual bone resection to give the defect region good load bearing contact surfaces.
The implant design method uses a deformable simplex mesh and a bounding surface to create an implant shape that fits the defect. The simplex mesh allows for smooth reconstruction of arbitrary shapes, and relies on internal forces to control its pre-defined stiffness, and external forces, derived from the bounding surface, to drive its deformation. The mesh can also be manipulated by interactive forces.
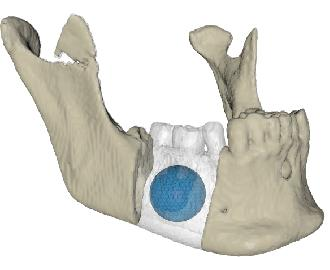
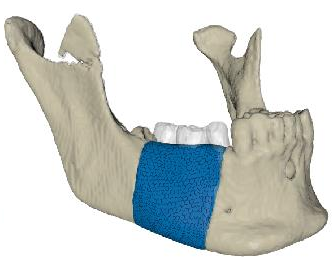
The surgeon positions the initial deformable model, which may be a simple sphere, in the defect region, and places the bounding surface around the defect (see Figure 1a). The bounding surface can be generated with user-defined geometry such as planes, the mirrored healthy contralateral side, or an approximately matching mandible from a database. The system calculates external forces for the deformable model that expand it towards the defect contact surfaces and the bounding surface. The surgeon lets the model grow until it fills the defect (see Figure 1b). He/she may also adjust the shape by applying interactive forces using the haptic device.
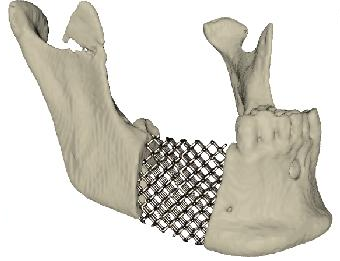
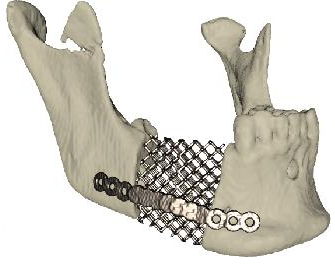
The surgeon may refine the implant with the cutting tool and reposition it inside the defect relying on haptic feedback to assess its fit. When he/she is satisfied with the result, the system generates the scaffold structures of the implant (see Figure 1c). The surgeon may now add plates with screw holes (see Figure 1d), and export the design to a format suitable for production.
| 
| 
| 
| (a) | (b) | (c) | (d) |
| Figure 1: Design steps: (a) initialization of the deformable model (blue). Its growth is con-strained by a bounding surface (transparent) and the defect surfaces; (b) model growing; (c) fine-tuning and generation of scaffold structure; (d) plate design. | |||
| Figure 2: Video demonstration of Custom Mandibular Implant Design. |
People
- Fredrik Nysjö, Centre for Image Analysis
- Pontus Olsson, Centre for Image Analysis
- Jan-Michael Hirsch, Department of Surgical Sciences, Oral & Maxillofacial Surgery, Uppsala University
- Ingrid Carlbom, Centre for Image Analysis