- Whole Hand Haptics with True 3D Displays
Ingrid Carlbom, Ewert Bengtsson, Filip Malmberg, Ingela Nyström, Stefan Seipel, Pontus Olsson, Fredrik Nysjö
Partners: Stefan Johansson, Material Science, Dept. of Engineering Science, UU; Jonny Gustafsson and Lars Mattson, Industrial Metrology and Optics Group, KTH; Jan-Michaél Hirsch, Dept. of Surgical Sciences, Oral & Maxillofacial Surgery, UU and Consultant at Dept. of Plastic- and Maxillofacial Surgery, UU Hospital; Håkan Lanshammar and Kjartan Halvorsen, Dept. of Information Technology, UU; Roland Johansson, Dept. of Neurophysiology, Umeå University; PiezoMotors AB, SenseGraphics AB
Funding: Knowledge Foundation (KK Stiftelsen)
Period: 090810-
Abstract: Our vision is a new interaction paradigm that gives the
user an unprecedented experience to touch and manipulate high
contrast, high resolution, three-dimensional (3D) virtual objects
suspended in space, using a glove that gives such realistic haptic
feedback that the interaction closely resembles interaction with
real objects. The system has two main components: The first is a
haptic system comprising a glove mounted on a robot arm that gives
the user force feedback during manipulation of an object. The second
component is a three-dimensional display based on a holographic
optical element (HOE) that permits the user to interact with a
virtual object by reaching into the object with the gloved hand.
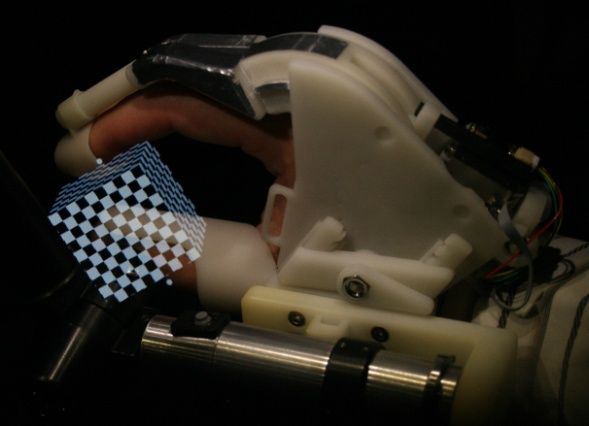
Haptics Hardware. After experiments with the first generation glove
built in 2010, we built a slimmer and lighter exoskeleton and moved
the force sensor in front of the linkage to make the glove more
sensitive to movements in the distal parts of the fingers. The
exoskeleton prototype has six degrees of freedom (DOF) movement of the
hand and one DOF gripping with the thumb and index finger. The six DOF
movements are accomplished with a commercial haptic arm, the SensAble
Phantom Premium, while the gripping exoskeleton ``glove'' is developed
within this project.
Haptics Software. One major goal of the Whole Hand Haptics Project is
to allow the user to feel object stiffness. This is important to
identify objects in the world around us, and it is particularly
important in virtual surgery for manipulation of soft tissue. With
this glove we are able to squeeze an object and feel different
stiffness, something that has never to our knowledge been accomplished
before with a compact glove! See Figure 2(a).
Another major goal of the Whole Hand Haptics project is to demonstrate
that gripping an object with two (and later three) fingers allows
object manipulation that is not feasible, or at least is very
cumbersome, with one point of contact with an object. Using the haptic
glove prototype, we have created software to simulate two finger
interaction with a virtual object. The user may lift and manipulate
the object in 3D, and a physics simulation which includes weight,
inertia, and gravity adds to the realism (Figure 2(b)).
Figure 2:
(a) The user squeezes a virtual ball whose stiffness can vary. (b) The user may lift and manipulate the object in 3D: a physics simulation with weight, inertia, and gravity adds to the realism.
|
|
New Display Hardware. Since our goal is to develop haptics for cranio
maxillo-facial surgery, we need a display system that allows
relatively uncomplicated porting of WISH, our toolkit for interactive
medical image analysis with volume visualization and haptics, from
conventional workstations to a stereo display with co-located
haptics. We chose a SenseGraphics Display 300, which is a
desktop-sized stereo workstation with radio-frequency shutter glasses,
a LCD-monitor, and a semi-transparent silvered mirror. Our tracking
software and all our haptics now run on both the holographic display
and the stereo display.
Perceptual Evaluation of Co-located and Non-co-located Haptics. We
conducted a user study that investigates the pros and cons of physically co-located haptics on two different
display types: the SenseGraphics half-transparent mirror 3D display
and our prototype autostereoscopic display based on a Holographic
Optical Element (HOE). We use two accuracy tasks with spatial accuracy
as the dependent variable and one manipulation task with time as the
dependent variable. The study shows that on both displays co-location
significantly improves completion time in the manipulation task, while
co-location does not improve the accuracy in the spatial accuracy
tasks.
Improvements to the 3D Holographic Display. This year we remade the
hologram assuming a smaller interocular distance. This change enables
a correct viewing experience for a larger number of people since there
is now little risk that the slit width (the width of the viewing zone
of one projector) is greater than the interocular distance of an adult
person. At the same time the display was fine tuned to minimize some
of the slit transition artifacts.
Software System. The software for both the display and the haptics is
based on the H3DAPI from SenseGraphics. We extended H3DAPI with a
software library that provides calibration of the graphics and all the
hardware components, including (1) projector calibration with key stone
correction for the HOE display; (2) haptics Phantom device calibration
to find the zero position of all its sensors, which required that we
manufacture a hardware jig, in addition to software development;
(3) for each display, calibration of the visual and the haptic work
volumes; and (4) for each display, registration of the tracking and the
visual work volumes.
Matching and calibrating the visual work volume and the haptic work
volume is essential, in particular when using co-located haptics,
since humans easily become aware of discrepancies between the visual
and the haptic work volumes. We acquired the OptiTrack system from
Natural Point, which is an IR optical tracker with built in motion
capture and image processing. We integrated the tracker camera
software with our version of the H3DAPI from SenseGraphics AB.
- Improved Interactive Medical Image Analysis through Haptic Display
Methods
Filip Malmberg, Ingela Nyström, Ewert Bengtsson, Stefan Seipel
Partner: Gunnar Jansson1, Dept. of Psychology, UU
Funding: TN-faculty, UU
Period: 0301-
Abstract: Modern medical imaging techniques provide 3D images of
increasing complexity. Better ways of exploring these images for
diagnostic and treatment planning purposes are needed. Combined
stereoscopic and haptic display of the images form a powerful
platform for such image analysis. In order to work with specific
patient cases, it is necessary to be able to work directly with the
medical image volume and to generate the relevant 3D structures as
they are needed for the visualization. Most work so far on haptic
display use predefined object surface models. In this project, we
are creating the tools necessary for effective interactive
exploration of complex medical image volumes for diagnostic or
treatment planning purposes through combined use of haptic and 3D
stereoscopic display techniques. The developed methods are tested on
real medical application data. Our current applications are
described further in projects 6 and 10.
A software package for interactive visualization and segmentation
developed within this project has been released under an open-source
license. The package, called WISH, is available for download at
http://www.cb.uu.se/research/haptics.
- Improved Methods for Interactive Graph-Based Segmentation
Filip Malmberg, Ingela Nyström, Ewert Bengtsson
Funding: TN-faculty, UU
Period: 0901-
Abstract: Image segmentation, the process of identifying and
separating relevant objects and structures in an image, is a
fundamental problem in image analysis. Accurate segmentation of
objects of interest is often required before further processing and
analysis can be performed. Despite years of active research, fully
automatic segmentation of arbitrary images remains an unsolved
problem.
Interactive segmentation methods use human expert knowledge as additional input, thereby making the segmentation problem more tractable. A successful semi-automatic method minimizes the required user interaction time, while maintaining tight user control to guarantee the correctness of the result. The input from the user is typically given in one of two forms:
- Boundary constraints
The user is asked to provide pieces of the desired segmentation boundary.
- Regional constraints
The user is asked to provide a partial labelling of the image elements (e.g., marking a small number of image elements as ``object'' or ``background'').
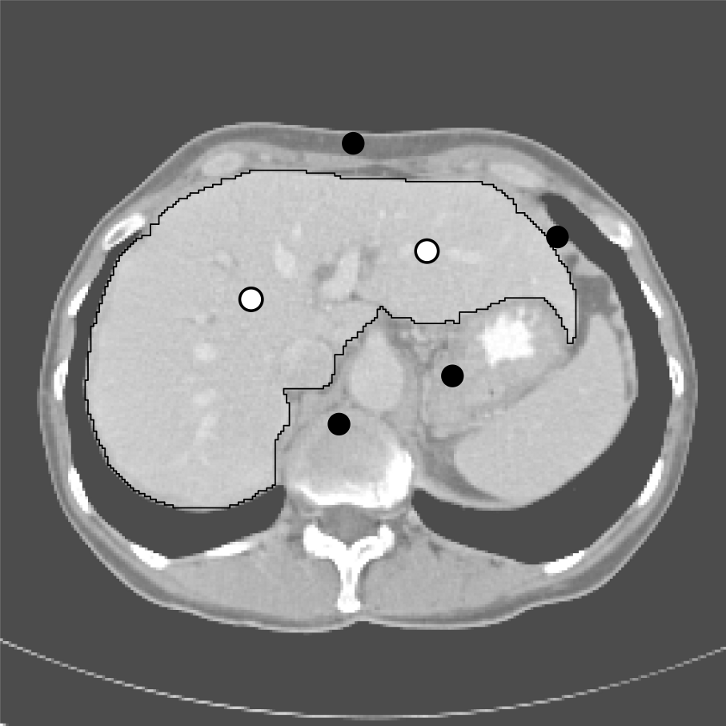
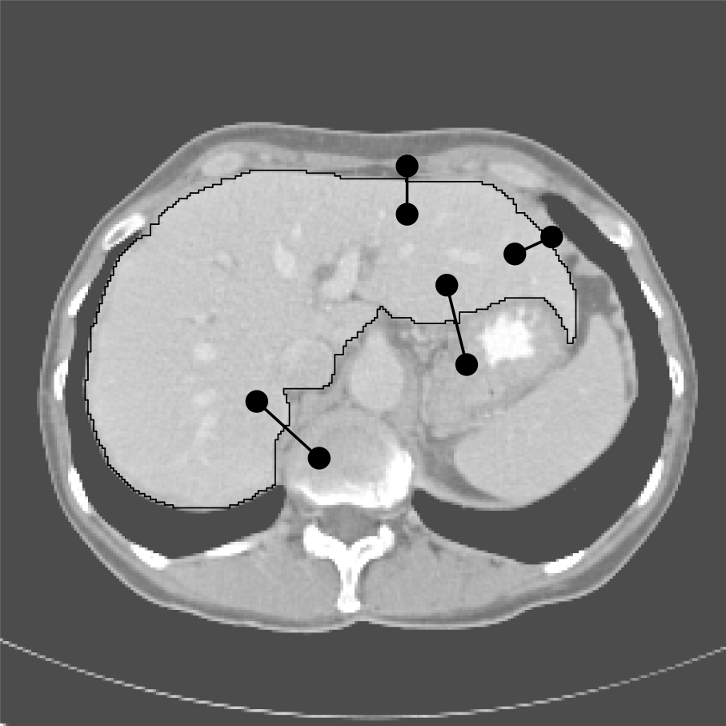
In a recent publication, we showed that these two types of input can
be seen as special cases of what we refer to as generalized hard
constraints. This concept is illustrated in
Figure 3. An important consequence of this
result is that it facilitates the development of general-purpose
methods for interactive segmentation, that are not restricted to a
particular paradigm for user input.
This project was presented as part of the PhD thesis by Filip Malmberg that was defended in May 2011. In 2011, two papers
related to this project were presented
at the Scandinavian Conference on Image Analysis (SCIA) in Ystad,
Sweden.
Figure 3:
Interactive segmentation of the liver in a slice from a CT
volume image, using three different interaction paradigms. (a)
Segmentation using boundary constraints. The black dots indicate
graph edges that must be included in the segmentation boundary. (b)
Segmentation using regional constraints. Black and white dots
indicate background and object seeds, respectively. (c) Segmentation
using generalized constraints. Each constraint is displayed as two
black dots connected by a line.
|
|
- Interactive Segmentation and Analysis of Medical Images
Filip Malmberg, Robin Strand, Ingela Nyström, Ewert Bengtsson
Partners: Joel Kullberg, Håkan Ahlström, Dept. of Radiology, Oncology and Radiation Science, UU
Funding: TN-faculty, UU
Period: 1106-
Abstract: Three-dimensional imaging technique such as computed tomography (CT) and magnetic resonance imaging (MRI ) are now routinely used in medicine. This has lead to an ever increasing flow of high-resolution, high-dimensional, image data that needs to be qualitatively and quantitatively analyzed. Typically, this analysis requires accurate segmentation of the image.
At CBA, we have been developing powerful new methods for interactive image
segmentation (see Project 3). In this
project, we seek to employ these methods for segmentation of medical images, in
collaboration with the Dept. of Radiology, Oncology and Radiation Science
(ROS) at the UU Hospital.
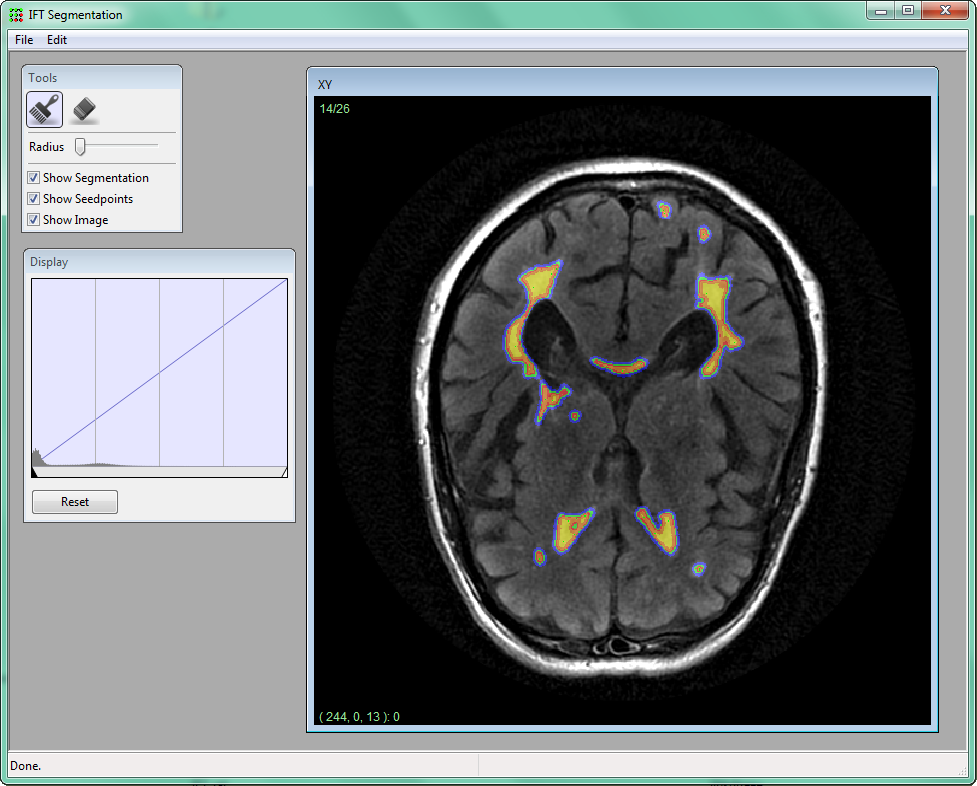
During 2011, the software and methods developed in this project have been used in two clinical studies at the hospital: One study on measuring white matter lesions in MR images of the human brain, and one study on quantifying adipose tissue in whole-body MR images of rats. Publications describing the results of these studies are underway.
Figure 4:
Screenshot from a software for interactive segmentation of volume images, developed at CBA. A radiologist segments white matter lesions in a MR image of the human brain by placing seed-points inside and outside the lesions. As the user provides additional seed-points, the segmentation is updated dynamically in real-time.
|
|
- ProViz - Interactive Visualization of 3D Protein Images
Lennart Svensson, Ida-Maria Sintorn, Johan Nysjö, Stina Svensson, Ingela Nyström, Anders Brun, Gunilla Borgefors
Partners: Dept. of Cell and Molecular Biology, Karolinska Institute; SenseGraphics AB
Funding: The Visualization Program by Knowledge Foundation; Vaardal Foundation; Foundation for Strategic Research; VINNOVA; Invest in Sweden Agency
Period: 0807-
Abstract: The traditional methods for solving the structure of
proteins are X-ray crystallography and NMR spectroscopy. An
alternative approach, Molecular Electron Tomography (MET), has more
recently gained interest within the field of structural biology as
it enables studies of both the dynamics of proteins and individual
macromolecular structures in tissue. However, MET results in images
of low resolution, as compared with e.g., X-ray crystallography, and
low signal-to-noise ratio. This creates a need for the new
visualization and analysis methods developed in this project.
We have developed a method for automatic parameter estimation for
proper visualization of MET volumes, as well as an interactive
registration method where the fitness landscape is explored
interactively, see example in Figure 5. A paper
about the latter method was presented at the International
Conference on Image Analysis and Processing (ICIAP 2011) in Italy in
September. A continuation investigating different implementation
techniques has been accepted to the International Joint Conference
on Computer Vision, Imaging and Computer Graphics Theory and
Applications, VISIGRAPP 2012. With a specialized implementation in
CUDA we achieved speed increases by an order of a magnitude compared
to a parallel CPU implementation.
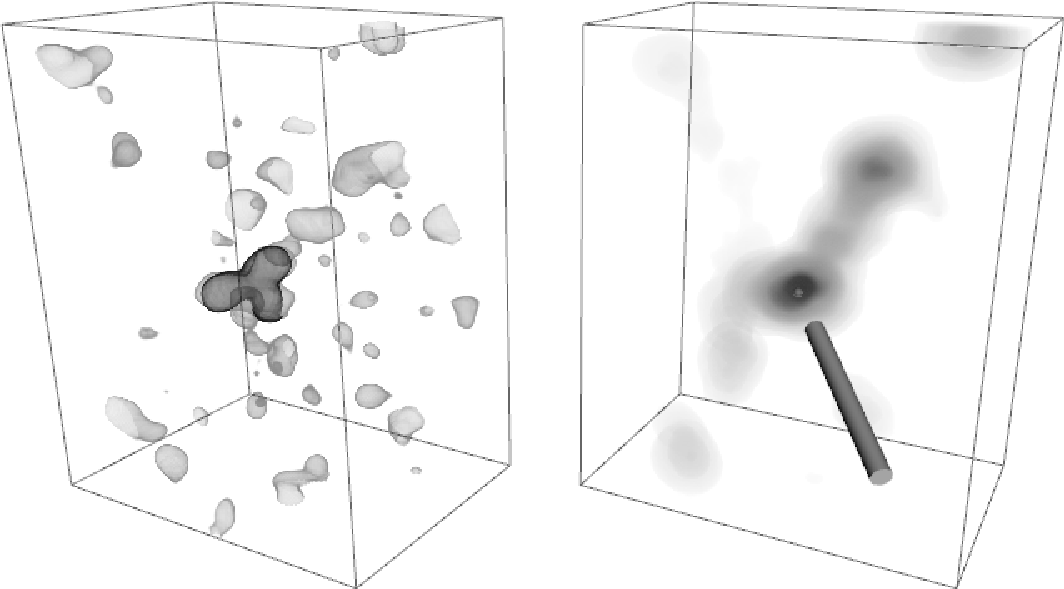
Figure 5:
Interactive exploration of a MET volume (left) of the antibody IgG in solution and a score volume showing the fitness value of the best registration at each position. The user clicks on a point in the right volume and sees the corresponding registration in the left volume. Iso-surfaces are used to show a particular intensity level in the left volume, and dark regions show the highest scores in the right image. The IgG template appear in the middle of the MET volume in dark grey.
|
|
- Orbit Segmentation for Craniomaxillofacial Surgery Planning
Johan Nysjö, Filip Malmberg, Ewert Bengtsson, Ingela Nyström
Partners: Jan Michael Hirsch, Elias Messo, Babett Williger, Dept. of Surgical Sciences,
UU Hospital
Funding: TN-faculty, UU; NovaMedTech
Period: 0912-
Abstract: A central problem in cranio-maxillofacial (CMF) surgery is to restore the normal anatomy of the skeleton after defects, i.e., malformations, tumors and trauma to the face. This is particularly difficult when a fracture causes vital anatomical structures such as the bone segments to be displaced significantly from their proper position, when bone segments are missing, or when a bone segment is located in such a position that any attempt to restore it into its original position poses considerable risk for causing further damage to vital anatomical structures such as the eye or the central nervous system. There is ample evidence that careful pre-operative planning can significantly improve the precision and predictability and reduce morbidity of the craniofacial reconstruction. In addition, time in the operating room can be reduced. An important component in surgery planning is to be able to accurately measure the extent of certain anatomical structures. Of particular interest in CMF surgery are the shape and volume of the orbits (eye sockets) comparing the left side with the right side. These properties can be measured in CT images of the skull, but this requires accurate segmentation of the orbits. Today, segmentation is usually performed by manual tracing of the orbit in a large number of slices of the CT image. This task is very time-consuming, and sensitive to operator errors. Semi-automatic segmentation methods could reduce the required operator time significantly. In this project, we are developing a prototype of a semi-automatic system for segmenting the orbit in CT images.
In 2011, this project was presented at the International Visual Information Conference (IVIC) in Malaysia by Nystrm as invited speaker. We have also started investigating other applications for the system, e.g., volumetric measurements of the airway space in cone beam CT images.
- Illumination Correction in Medical Images
Khalid Niazi, Ingela Nyström
Partners: M. Talal Ibrahim, Ling Guan, Ryerson Multimedia Lab, Ryerson University, Canada
Funding: COMSATS IIT, Islamabad
Period: 1003-
Abstract: Non-uniform illumination is considered as one of the major
challenges in the field of medical imaging. It is often caused by
the imperfections of the data acquisition device and the properties
of the object under study. We have developed an iterative method
which suppresses the magnitude of the frequencies that are
responsible for non-uniformity in an image using the gray-weighted
distance transform (GWDT). Moreover, the proposed method is not user
dependent as all the parameters are automatically generated on the
basis of the GWDT. It is tested on images acquired from several
imaging modalities which makes it different and unique from most of
the existing methods. See Figure 6.
This project was presented as part of the PhD thesis by Khalid Niazi that was defended in November 2011.
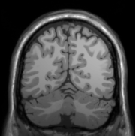
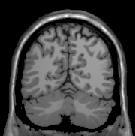
Figure 6:
a) A slice from an MRI suffering from non-uniform illumination. b) Result of the proposed method in Project 7.
[] 
[] 
|
- Analysis of Dynamic Breast MRI
Ewert Bengtsson, Ingela Nyström
Partners: Stuart Crozier, Andrew Mehnert, School of Information Technology and Electrical Engineering, University of Queensland, Brisbane, Australia and MedTech West, Chalmers and Sahlgrenska University Hospital
Funding: TN-faculty, UU; The Australian Research Council
Period: 0503-
Abstract: The pattern of change of signal intensity over time in
dynamic contrast enhanced magnetic resonance images (DCE-MRI) of the
breast is an important criterion for the differentiation of
malignant from benign lesions. Malignant lesions release angiogenic
factors which induce the growth and sprouting of existing blood
vessels and the formation of new leaky vessels. This gives rise to
increased inflow and an accelerated extra-vascularisation of
contrast agent at the tumour site which is reflected as T1-weighted
signal increase. However strong enhancement is not specific to
malignant lesions. Contrariwise shallow or no enhancement is a
feature of some malignant lesions. As a result the specificity of
the technique is poor to moderate. This project is seeking to
improve the specificity of breast MRI, and therefore its clinical
utility mainly by means of computer visualization, image analysis,
and statistical pattern recognition. This collaborative project
started when Bengtsson was on sabbatical at the University of
Queensland in 2004-2005 and has since then produced a number of
results e.g. on parametric modelling of contrast enhancement, 3D
colour-coding of 4D DCE-MRI data, hardware-accelerated volume
visualization and haptic interaction/interrogation of the volumetric
data. Due to Mehnert's move to Sweden the activity has been low
during 2011, but we have plans to continue the collaboration on the
project.
- Analysis and Processing of Three-Dimensional Magnetic Resonance Images on Optimal Lattices
Elisabeth Linnér, Robin Strand
Funding: TN-faculty, UU
Period: 1005-
Abstract: Three-dimensional images are widely used in, for example, health care. With optimal sampling lattices, the amount of data can be reduces by 30% without affecting the image quality. In this project, methods for image acquisition, analysis and visualization using optimal sampling lattices are studied and developed, with special focus on magnetic resonance imaging. The intention is that this project will lead to faster and better processing of images with less demands on data storage capacity.
A paper on aliasing errors on the fcc, bcc, and cubic grids was presented at 8th International Conference on Large-Scale Scientific Computations (LSSC), Sozopol, Bulgaria.
- Haptic-enabled 3D Angle Measurements in CT Wrist Images
Johan Nysjö, Filip Malmberg, Ingela Nyström, Ida-Maria Sintorn
Partners: Albert Christersson, Dept. of Surgical Sciences, UU Hospital
Funding: TN-faculty, UU
Period: 1111-
Abstract: To be able to decide the correct treatment of a fracture, for example, whether a fracture needs to be operated on or not, it is important to assess the details about the fracture. One of the most important factors is the fracture displacement, particularly the angulation of the fracture. When a fracture is located close to a joint, for example, in the wrist, which is the most common location for fractures in the human being, the angulation of the joint line in relation to the long axis of the long bone needs to be measured. Since the surface of the joint line in the wrist is highly irregular, and since it is difficult to take X-rays of the wrist in exactly the same projections from time to time, conventional X-ray is not an optimal method for this purpose. In most clinical cases, the conventional X-ray is satisfactory for making a correct decision about the treatment, but when comparing two different methods of treatment, for example, two different operation techniques, the accuracy of the angulation of the fractures before and after the treatment has to be higher.
In this project, we are developing a system for measuring these angles in 3D computed tomography (CT) images of the wrist. Our proposed system is semi-automatic; the user is required to guide the system by indicating the approximate position and orientation of various parts of the radius bone. This information is subsequently used as input to an automatic algorithm that makes precise angle measurements. To facilitate user interaction in 3D, we use a system that supports 3D input, stereo graphics, and haptic feedback. Figure 7 shows a prototype of the system.
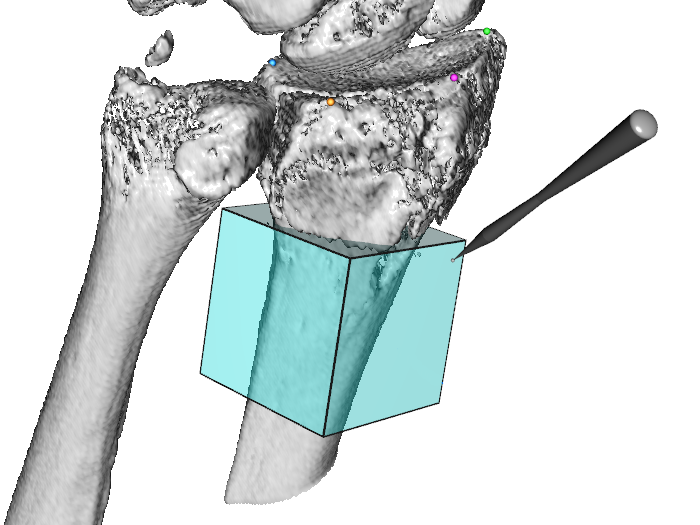
Figure 7:
(Left) A user working at the visuo-haptic display. (Right) A volume selection tool used to estimate the central long axis of the radius bone.
|
|
- Efficient Algorithms for Computer Graphics
Ewert Bengtsson, Anders Hast
Partner: Tony Barrera, Uppsala
Funding: TN-faculty, UU
Period: 9911-
Abstract: Computer graphics is increasingly being used to create realistic
images of 3D objects for applications in entertainment, (animated
films, games), commerce (showing 3D images of products on the web),
industrial design and medicine. For the images to look realistic high
quality shading and surface texture and topology rendering is
necessary. A proper understanding of the mathematics behind the
algorithms can make a big difference in rendering quality as well as
speed. We have in this project over the years re-examined several of
the established algorithms and found new mathematical ways of
simplifying the expressions and increasing the implementation speeds
without sacrificing image quality. We have also invented a number of
completely new algorithms. The project is carried out in close
collaboration with Tony Barrera, an autodidact mathematician. It has
been running since 1999 and resulted in more than 25 international
publications and a PhD thesis. During 2011 we did not produce any new
publications mainly due to Anders Hast sabbatical in Italy but a
number of new mathematical results were obtained that are expected to
lead to publications in 2012.
- Ubiquitous Visualization in the Built Environment
Stefan Seipel, Fei Liu
Funding: University of Gävle and TN Faculty, UU
Period: 110801-
Abstract: Mobile devices have recently seen an enormous advancement in
their computational power with many exciting and promising pieces of
technology available at the same time such as mobile graphics
processing, spatial positioning, and access to geo-spatial
databases. This research project in ``ubiquitous visualization'' will
deal with mobile visualization of spatial data in indoor and outdoor
environments. It addresses several key problems for robust mobile
visualization such as spatial tracking and calibration; image based 2D
and 3D registration and efficient graphical representations in mobile
user interfaces. Evaluation of developed methods or techniques,
mainly with respect to the human factor, will be an integral part of
these studies in order to endeavor the best user
experience. Application scenarios studied in this project will
predominantly, but not exclusively, be in the field of urban spaces
and built environment.